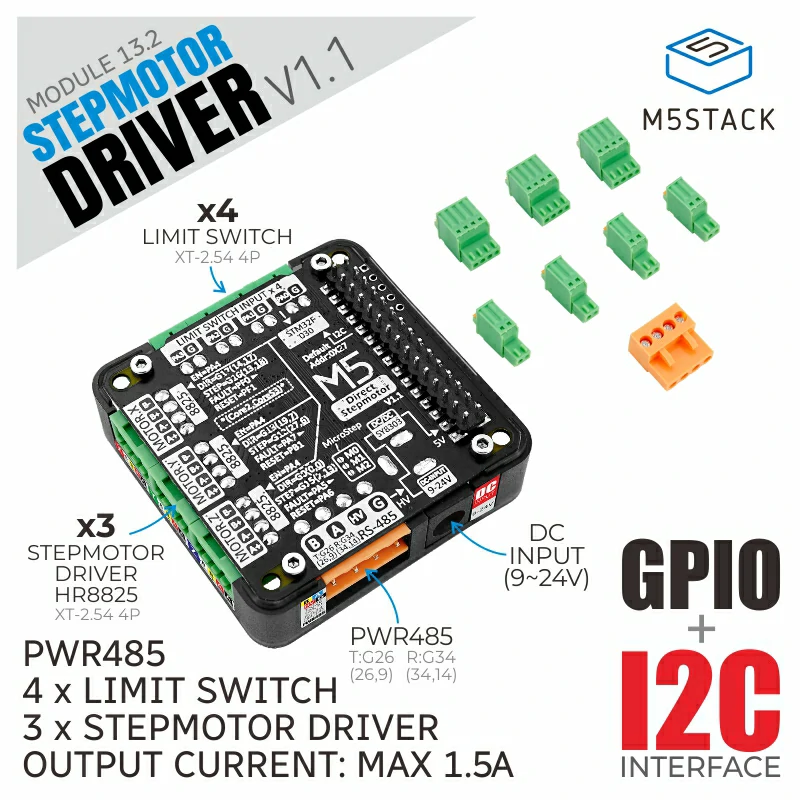
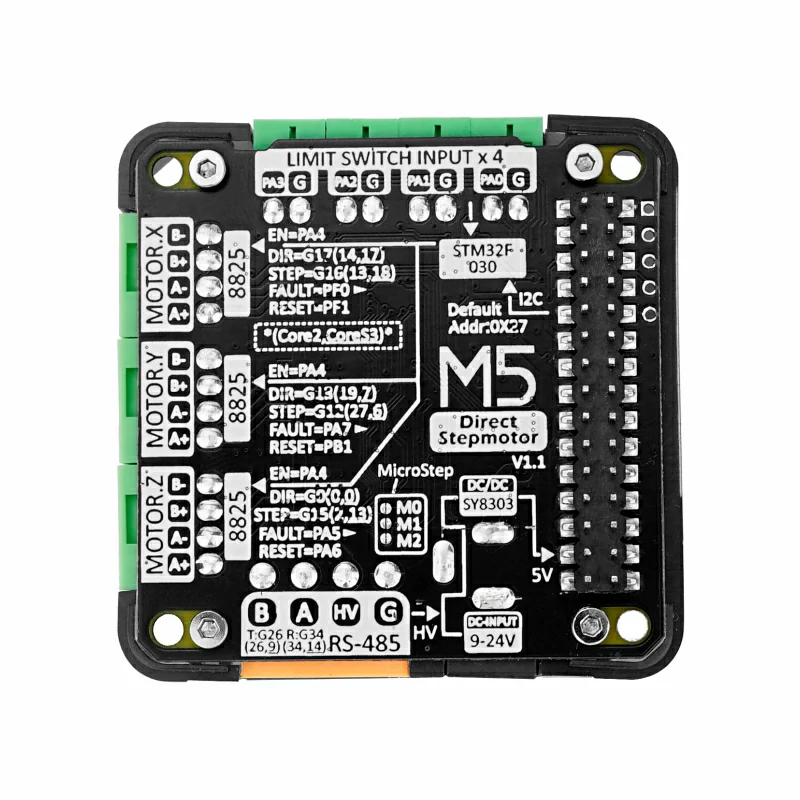
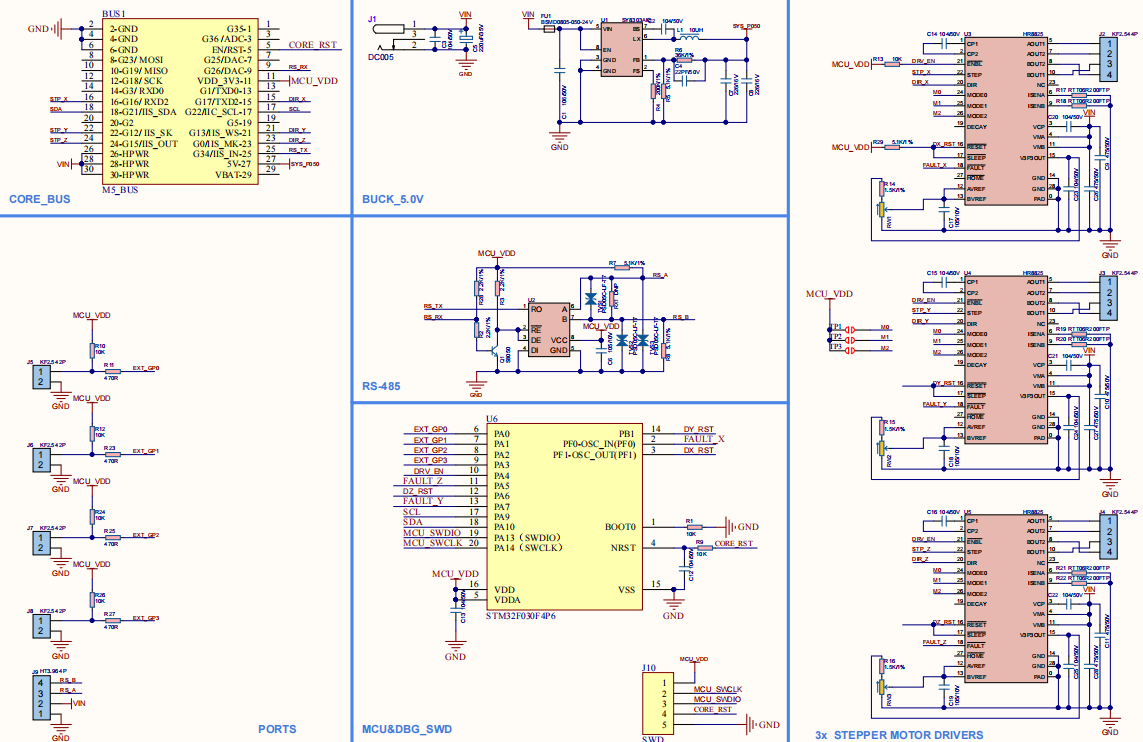
Stepmotor Driver Module 13.2 V1.1 is a stepper motor driver adapted to M5 main control, using STM32+HR8825 stepper motor drive scheme, providing 3-way bipolar stepper motor control interface. After stacking the driver with the M5 main controller, the ESP32 internal signal of the main control directly connects to the driver chip, which can realize independent control or multi-axis motor linkage. The module integrates STM32F030F4P6 chip as IO expansion, provides 4 sets of input signal terminals, 1 set of driver chip enable control, through I2C communication, can control and monitor the reset and status of the driver chip, can be used for external limit switch, motor brake function. The module contains 3 pads to control the 'subdivision mode of 3 sets of stepper motors to realize the subdivision adjustment of stepper motors. The integrated PWR485 communication interface (RS485 + 9-24V power input) and DC-JACK can be used for communication and the power supply mode will be more flexible. Support UIFlow graphical programming, the signal output can be easily configured, and the stepper motor can be controlled more precisely. This module is suitable for a variety of stepper motor motion control scenarios, such as printers, robotic arms, etc.
**Note: ** It is forbidden to plug and unplug the motor with electricity when using, and all operations should be carried out after the equipment is powered off to avoid damaging the module.
Features
STM32F030F4P6@: ARM® 32-bit Cortex™-M0 CPU
Triaxial HR8825 stepper motor driver
Suitable for bipolar stepper motors
Each channel has a current regulation potentiometer and can drive up to 1.5A
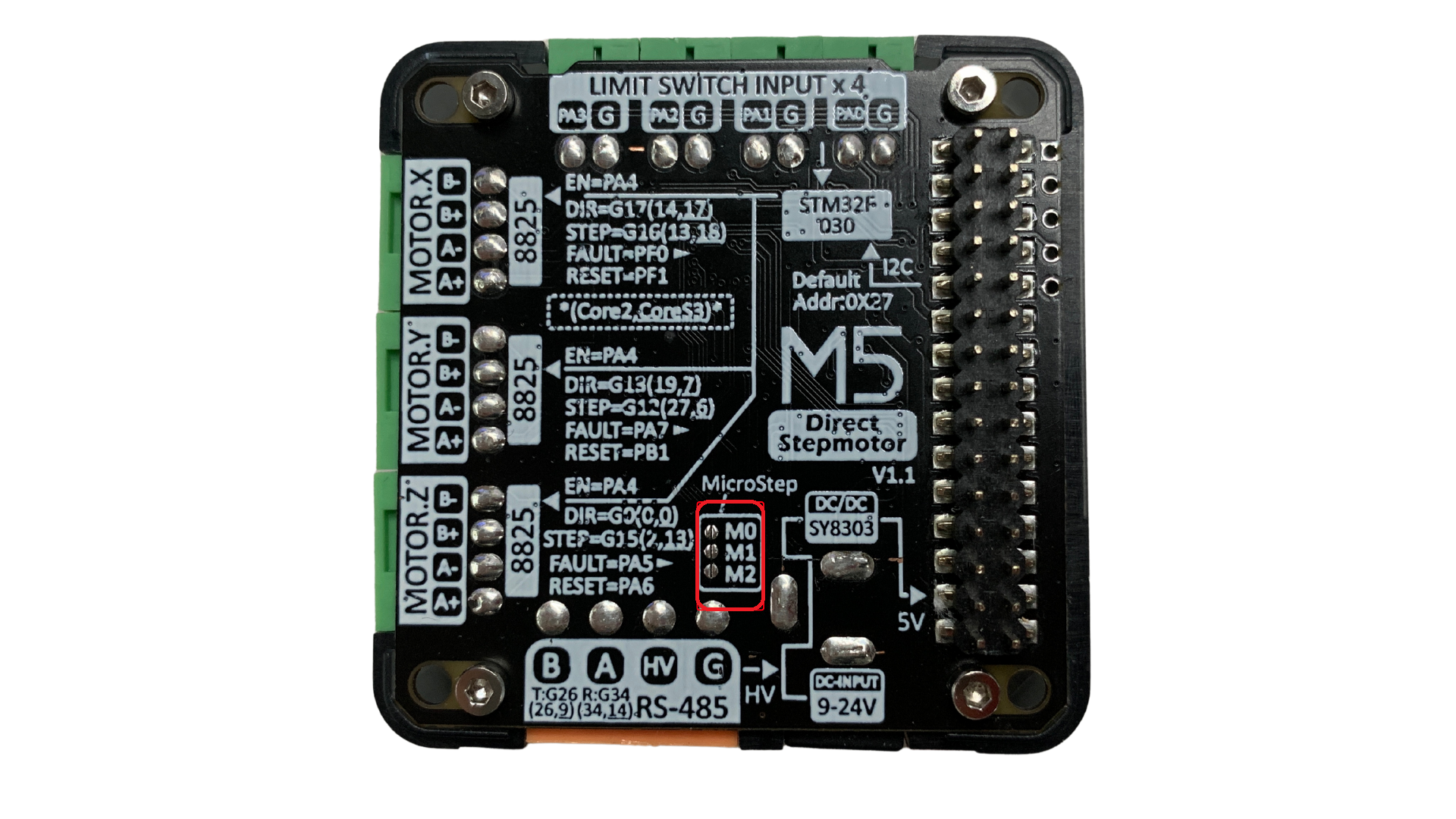
Support multiple subdivision modes, up to 1/32 STEP subdivision
4 sets of signal input interface
PWR485 communication interface (RS485 + 9-24V power input)
DC-JACK terminal input (9-24V)
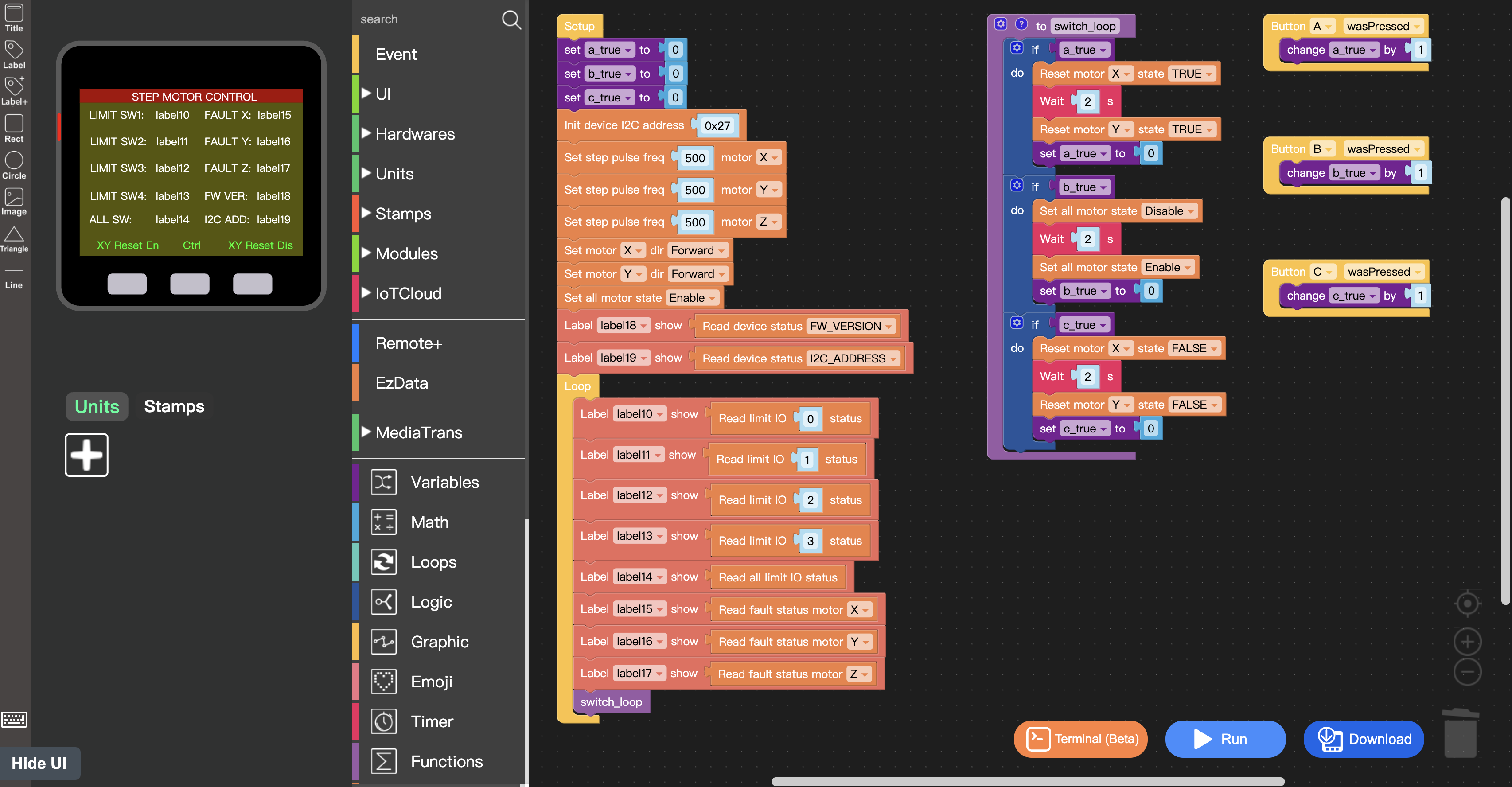
Development platform: Arduino, UIFlow
Includes
1x StepMotor Driver v1.1
4x 2.54-2P terminals
3x 2.54-4P terminals
1x 3.96-4P terminals
Applications
3D printer
scanner
CNC engraving machine control
Motion module control
Specification
Resources
Parameters
IO expansion chip
STM32F030F4P6
Stepper motor drive chip
HR8825
Support for segmentation mode
FULL、1/2、1/4、1/8、1/16、1/32
Maximum drive current for a single channel
1.5A
Input signal terminal specifications
2.54-2P
Motor terminal specifications
2.54-4P
RS485 terminal block specifications
3.96-4P
Operating temperature
0-40°C
Product Size
54.2 * 54.2 * 13.2mm
Package Size
95 * 65 * 25mm
Product Weight
40g
Package Weight
60g
Micro step truth table
M2
M1
M0
Resolution
0
0
0
FULL
0
0
1
1/2
0
1
0
1/4
0
1
1
1/8
1
0
0
1/16
1
0
1
1/32
1
1
0
1/32
1
1
1
1/32
Adjusting the subdivision mode troubles the connection with the soldering iron soldering the associated pads.
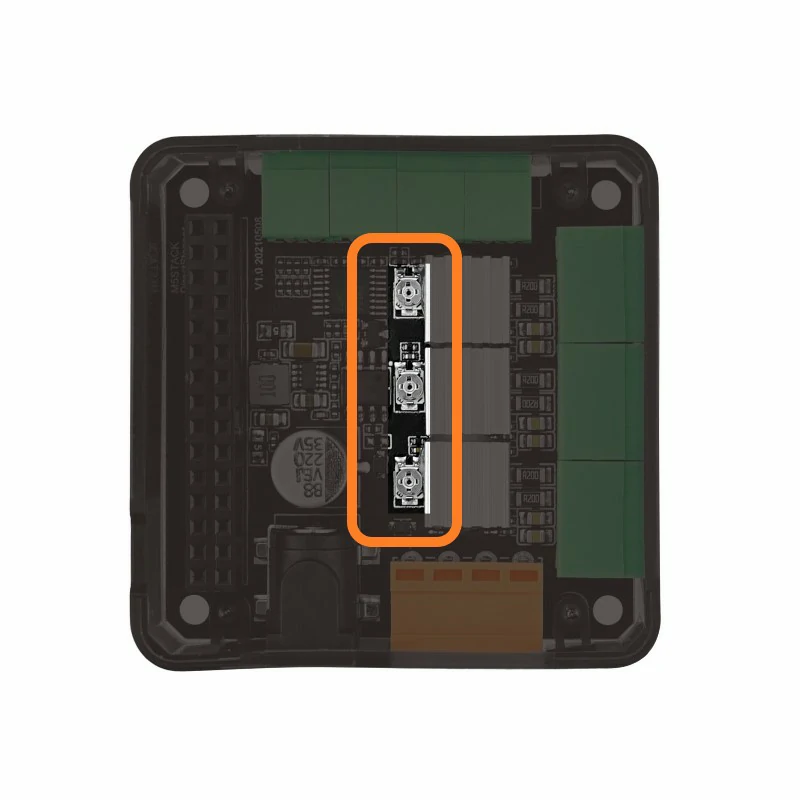
Drive current adjustment
The stepping motor has different specifications, and the required drive current may also be different. The current output can be adjusted through the metal knob on the module during use. In order to prevent the motor from overheating or damage, adjust the knob slowly during adjustment, observe the motor status or connect an ammeter to determine the appropriate drive current.